- Platt, R., Brock, O., Fagg, A. H., Karuppiah, D., Rosenstein, M.,
Coelho, J., Huber, M., Piater, J., Wheeler, D., and Grupen, R. A.
(2003),
A Framework For Humanoid Control and Intelligence,
Proceedings of Humanoids 2003, Electronically Published
Recent movies: whole body manipulation and learning from demonstration
Movie archive: Grasping, juggling, visual tracking, and writing
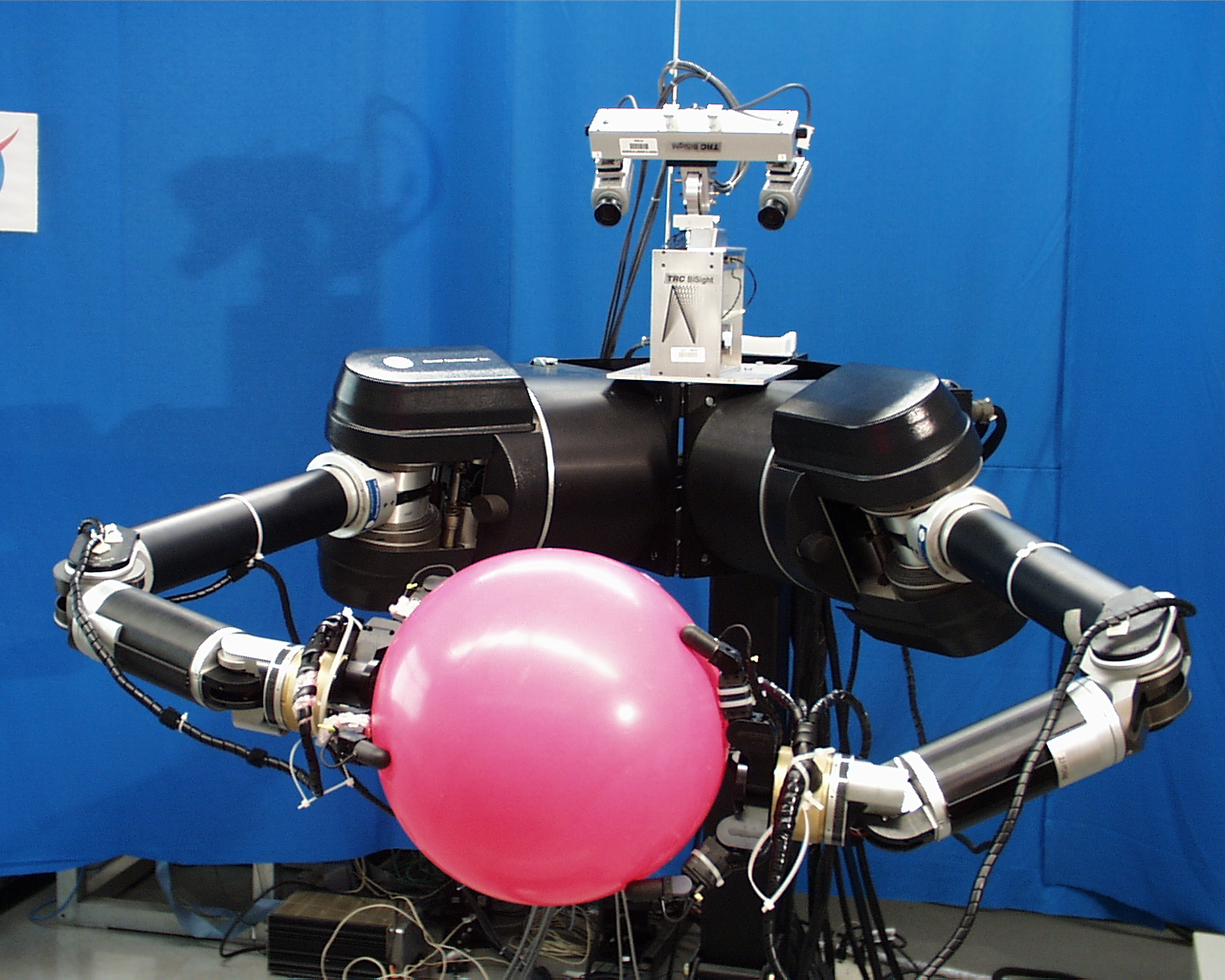
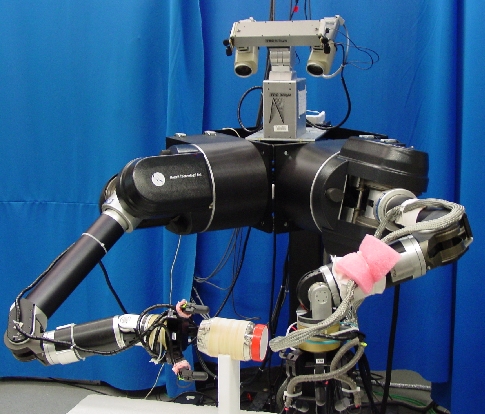
Grasping as a Haptic Control Problem
One class of closed-loop controllers that we have been developing is aimed at the formation of stable grasps. Rather than starting with a detailed model of the object to be grasped (e.g., as derived from a vision system), the first step in our approach is to haptically explore the object to be grasped. At each contact with the object, the controller estimates the total force and torque applied to the object by the set of contacts. Given a simple model of the local object geometry, the controller computes movements of the fingers and arm that attempt to reduce the total force and torque. In particular, we formulated the problem in terms of simultaneously satisfying the objectives of minimizing the net force and net torque that are applied to an object. The power of this approach to grasp formation is that the controller can be assigned a variety of different physical resources, including finger tips, palms, multiple hands, and even ``virtual contacts,'' such as gravity.- Platt, Jr., R., Fagg, A. H., Grupen, R. A. (2004),
Manipulation Gaits: Sequences of Grasp Control Tasks,
to Appear in the International Conference on Robotics and
Automation (ICRA'04)
- Platt, Jr., R., Fagg, A. H., Grupen, R. A. (2003),
Extending Fingertip Grasping to Whole Body Grasping, Proceedings of International Conference on Robotics and
Automation (ICRA'03), pp. 2677-2682
- Platt, Jr., R., Fagg, A. H., Grupen, R. A. (2002),
Nullspace Composition of Control Laws for Grasping,
Proceedings of the International Conference on Intelligent Robots and
Systems (IROS'02), Electronically Published
Learning to Prospectively Select Grasps
The problem of grasping an object and moving it to another location has long been studied in robotics. One approach to this problem is to explicitly compute ``pick-and-place'' constraints and to perform a search within the constrained space. In contrast, humans are capable of robustly planning and executing grasps to objects about which their knowledge is incomplete. Furthermore, it appears that grasping strategies are acquired incrementally as a function of experience with different objects.We have applied a reinforcement learning technique to the problem of discovering an appropriate sequence of grasp and place actions. Rather than starting with a model of which grasp was appropriate for a given final object configuration, the robot learned through interaction with the environment to select a grip in anticipation of how the grasped object was to be used in future actions. The behavior exhibited through the learning process by the robot demonstrated interesting qualitative similarities to what one sees in grip selection with children in a similar task.
- Wheeler, D. S., Fagg, A. H., Grupen, R. A. (2002),
Learning Prospective Pick and Place Behavior,
Proceedings of the International Conference on Development and
Learning (ICDL'02), Electronically Published
Movies: Learning to grasp prospectively