Computational Models of Muscle/Spinal Dynamics
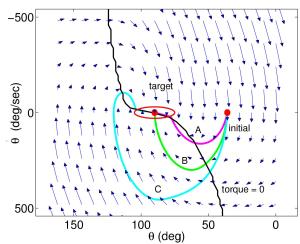
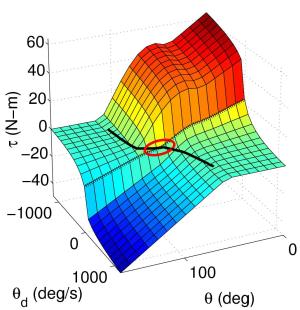
One of the critical questions to be addressed when examining the role of the brain in motor control is the relative contribution of peripheral systems, specifically, muscles, the sensors embedded within the muscles and other tissue, and the neural circuitry within the spinal cord. It is common in the modeling community to assume that these peripheral systems impose a linear transformation of the motor signals generated by the brain. Although a simple assumption, it implies that the full complexity of a temporal muscle activation pattern is due to the motor commands generated by the brain itself (and requires a large number of parameters to describe). I have developed a model of muscle/spinal interaction that includes key nonlinearities, particularly within the feedback loop implemented by the spinal circuitry (Houk, Fagg, and Barto, 1999). Although these nonlinearities impose additional complexities to the modeling process, we have shown that they can drastically reduce the complexity of the motor command that is necessary to produce realistic muscle activation patterns (Fagg, Barto, and Houk, 1998). This observation has important implications for how the brain represents and learns motor skills.
- Houk, J. C., Fagg, A. H., Barto, A. G. (2002),
Fractional Power Damping Model of Joint Motion,
Progress in Motor Control: Structure-Function Relations in
Voluntary Movements (M. Latash, Ed.), Vol. II, pp. 147-178
- Barto, A. G., Fagg, A. H., Sitkoff, N., Houk, J. C. (1999)
A Cerebellar Model of Timing and Prediction in
the Control of Reaching,
Neural Computation 11:565-594
- Fagg, A. H., Zelevinsky, L., Barto, A. G., Houk, J. C. (1998) A Pulse-Step Model of Control for Arm Reaching Movements, Proceedings of the Spring Meeting on the Neural Control of Movement
Models of Biological Motor Skill Learning
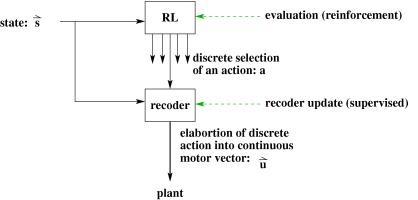
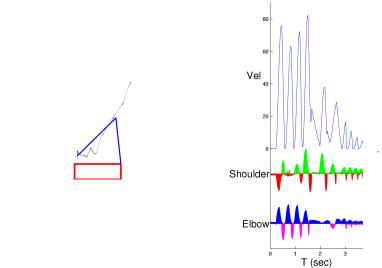
It is clear from the psychophysics and neuroscience areas that multiple, distinct mechanisms of learning are involved in the process of acquiring a new skill. In addition, there exist interesting parallels between theories of machine learning and the mechanisms that are implemented by several brain regions. I am interested in developing models of these learning mechanisms and their interaction. For example, an area of the brain called the Cerebellum is thought to be involved in learning coordinated motor skills. Experimental evidence suggests that the motor outflow from this area is trained using a mechanism that relates to supervised learning (or regression) techniques. One unknown is the source of the error information that drives the learning process. When one examines reaching movements in adults, we often see a gross movement to the target followed by a sequence of smaller movements. A hypothesis that I have been exploring is that this training information (in the form of an error vector) is derived from the submovement that follows the current one (Fagg, Sitkoff, Barto, and Houk, 1997; Fagg, Zelevinsky, Barto, and Houk, 1998; Barto, Fagg, and Houk, 1999).This approach is interesting in that the motor system, in some sense, is responsible for teaching itself how to produce smoother, more coordinated movements. However, this model assumes that the motor system is always capable of generating an effective sequence of corrections to take the arm to the target. One possibility is that some aspect of a corrective action is selected as a function of its utility in completing the movement (Fagg, Barto, and Houk, 1998). Another set of brain regions known as the Basal Ganglia are thought to be involved in the assessment of the utility of actions. I am currently developing an abstract model in which a reinforcement learning (RL) module is responsible for selecting from a small number of available corrective actions, but the meaning of these actions is altered at the same time by a supervised learning mechanism. This model is particularly interesting in that it uses exploratory learning (specifically, RL) when there is little information about how to perform a movement, but then comes to rely on supervisory training information when the teacher becomes competent.
- Barto, A. G., Fagg, A. H., Sitkoff, N., Houk, J. C. (1999)
A Cerebellar Model of Timing and Prediction in
the Control of Reaching,
Neural Computation 11:565-594
- Fagg, A. H., Barto, A. G., Houk, J. C. (1998)
Learning to Reach Via Corrective Movements,
Proceedings of the Tenth Yale Workshop on Adaptive and
Learning Systems, New Haven, CT, June 10-12, pp. 179-185
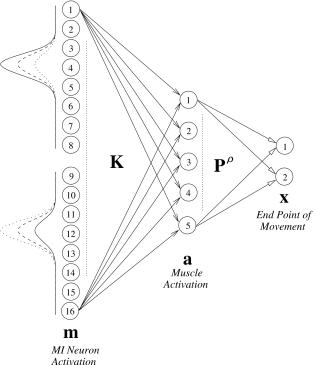
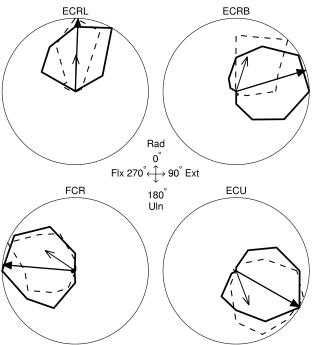
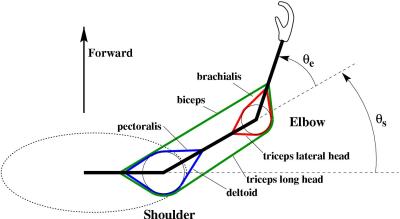
Optimization-Based Approaches to Muscle Recruitment
I study the formation of movement representations and execution strategies. The production of movements typically involves the differential recruitment of many more muscles than skeletal degrees of freedom and many more neurons than muscles. However, there are specific regularities in the way in which neurons and muscles are recruited in the movement generation process (for example, both muscles and cells are often recruited as function of the cosine of the direction of movement). The question is what factors lead to these regularities despite the redundancies that exist. In our model, we explore the hypothesis that many of these effects can be explained through a process that attempts to optimize both the movement error and the degree of effort used to perform the movement (Fagg, Shah, and Barto, 2002). The model produces patterns of systematic wrist muscle recruitment that are consistent with both human and monkey data. Furthermore, through this approach we are able to explore issues surrounding the neural representation of movement (Shah, Fagg, and Barto, 2004) and the formation of these representations (Sondhi, Shah, and Fagg, in preparation). I am currently working to extend these techniques to the area of grasp formation (Fagg, 1996; Fagg and Arbib, 1998).
- Shah, A., Fagg, A. H., Barto, A. G. (2004)
Cortical Involvement in the Recruitment of Wrist Muscles,
to appear in the Journal of Neurophysiology
(pdf version)
Fagg, A. H., Shah, A., Barto, A. G. (2002) A Computational Model of Muscle Recruitment for Wrist Movements, Journal of Neurophysiology, 88(6):3348-3358 (pdf version)
- Fagg, A. H.
A Computational Model of The Cortical Mechanisms Involved
in Primate Grasping,
Ph.D. Dissertation, Computer Science Department, University of
Southern California, 1996
- Fagg, A. H., Arbib, M. A. (1998)
Modeling Parietal-Premotor Interactions in
Primate Control of Grasping,
Neural Networks 11(7/8):1277-1303
(pdf version)